

“日系電車終于開竅,激光雷達裝車、終于跟上節奏!”
“沒有激光雷達還談什么智能駕駛?”
“低配版在車頂貼一個激光雷達裝飾殼吧,最起碼不會被笑話。”
“你都買電車了怎么不買帶激光雷達的版本?”
等等。
在有關激光雷達的內容中,能看到最多的評論就是這些了;似乎沒有激光雷達的汽車變成了“低智”款,只有車頂有一個或兩個“小犄角”的汽車才算真智能……儼然已經出現“激光雷達崇拜。”然而激光雷達在現階段只是為輔助駕駛系統錦上添花,實際意義有多大是值得商榷的;尤其是在產品迭代之后對老款車的態度基本一致之后。也許這樣的描述不是很好理解,那就逐一來講。
傳感器的分類
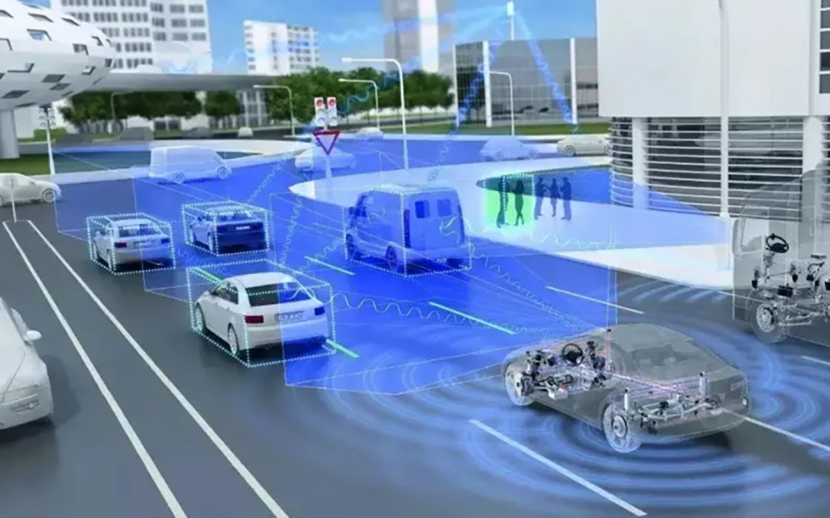
帶有輔助駕駛功能的汽車需要各種各樣的傳感器,最常用的有四類。
分別為:超聲波雷達毫米波雷達激光雷達攝像頭
超聲波雷達的作用非常有限,其采用的機械波決定只能實現近距離偵測;其實超聲波雷達就是之前最常見的“倒車雷達,”保險杠上的小探頭就是它了。這種傳感器的制造成本很低,技術門檻也很低,許多老舊車輛都可以自行加裝;所以這種傳感器在行駛中基本沒有意義,但由于成本優勢,車企們往往會給車輛裝上12個。

剩下的雷達采用電磁波。
毫米波雷達的偵測距離遠,受天氣因素影響程度小;對于輔助駕駛系統來說是非常重要的;不過制造成本相對較高,可以是超聲波雷達的十倍以上,于是車輛往往只會安裝三到五個,但也足夠用了。
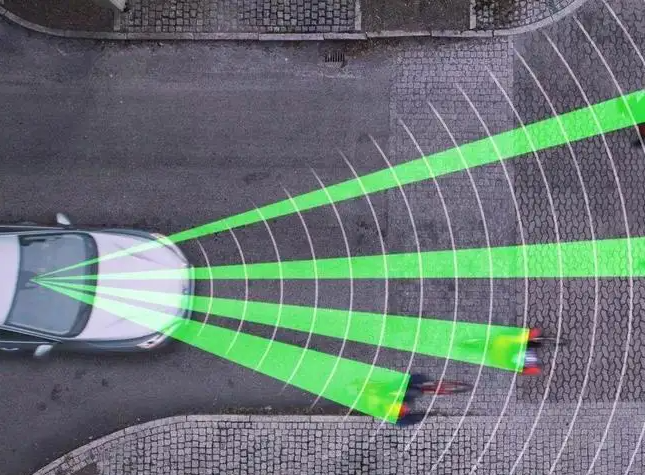
不過毫米波雷達基本無法實現三維立體的偵測,可以發現障礙物但無法判斷障礙物的類型。
所以才需要激光雷達,這種采用激光束的傳感器能夠實現3D測繪障礙物;理論上是可以識別且認識障礙物的,可以幫助車輛做出更精準的駕駛操作。但是激光雷達受天氣因素影響較大,適用場景非常有限。
攝像頭無需多講。
L2&2級是關鍵
正如第一節所講,激光雷達的適用場景是有限的,所以才需要毫米波雷達和攝像頭的輔助。不過這并不是最重要的因素,關鍵因素是加上激光雷達也不過是安全智能駕駛的下限——能發現、能感知、能理解,這也不過只是相當于人類駕駛員的能聽見、能看到、能認識,僅此而已。
然而能聽見、能看到、能認識不等于“會開車。”
新手學員在教練車里也能聽見、看到和認識,可是卻不見得知道該如何駕駛汽車去規避;激光雷達的配備僅限于做到前一點,如果把激光雷達比喻成眼睛的話——有眼睛就等于能安全的開車嗎?

智能駕駛的關鍵是運算平臺。
而現在極少有關于運算平臺真實水平的描述!其對應的真實描述其實是有參考的,參考就是0/1/2/3/4/5級系統和對應的國際標準里的L1/2/3/4/5。
如果系統標準只是“L2&2級”的話,就算給汽車裝一圈昂貴的激光雷達也沒有意義——其僅相當于一個“眼睛明亮的小學生。”能做到的只是在限定場景中的輔助駕駛——舉個例子:“L2&2級”系統就像是一個教練員和學員同時坐在車里,學員在限定訓練場地里才能夠開車,雖然學員的眼睛明亮但并不一定能做出正確的判斷和操作;教練員才是保證車輛行駛安全的關鍵,那么學員明亮的眼睛還有很大的意義嗎?說白了不過是可以學習駕駛的門檻和下限罷了。

所以除非“L2&2級”系統未來可以升級,否則對應標準的汽車有多少激光雷達或有沒有激光雷達都不重要——因為“都拿不到駕駛證。”
而就目前車企在產品迭代前后對老款車輛的態度來看,老款車輛在未來大概率是不會通過OTA去升級為“L3/4/5&3/4/5”系統的;究其原因是運算平臺的硬件算力不見得夠,同時老舊車輛如果能持續升級更新則難免影響新車的銷售,所以所謂的智能汽車基本都是進行幾次不具有顛覆性的座艙域OTA或整車OTA之后就“熄火。”

結語:
對于配備“L2&2級”系統而言,筆者認為有沒有激光雷達是無所謂的,因為現在的相關機構已經明確車輛使用系統的標準并要求明確系統功能邊界;是基礎的輔助組合駕駛水平就不能以自動、高階或智能等詞匯描述,也不允許具備相應功能;反之,如果具備相應功能則等于成為三級或更高標準的系統,車企需要改變車輛系統定義并承擔相應風險,于是截止目前就沒有這樣的量產車。
那么現在則是不論有沒有激光雷達都只能用于限定場景的輔助駕駛,司機還是“第一和唯一責任人,”激光雷達還重要嗎?
答案很清晰。

















 粵公網安備 44010602000157號
粵公網安備 44010602000157號
