
如今,我們討論智駕汽車的視覺解決方案,必然繞不過兩大陣營:一方是以特斯拉為代表的純視覺方案:環境感知以攝像頭主,以超聲波雷達和毫米波雷達為輔;另一方是以國內眾多高端新能源汽車品牌為代表的視覺融合感知方案:搭載至少一顆激光雷達、數量不等的超聲波雷達和毫米波雷達,依靠雷達系統完成距離感知,依靠眾多攝像頭完成圖像感知,從而共同完成環境感知。
今天,我們以特斯拉Model Y和阿維塔11為例,對比兩車的主要差別,來聊聊其中的奧秘和差距。
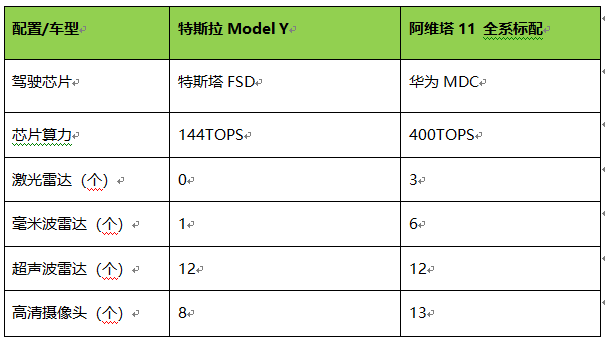
激光雷達,毫米波雷達,雷達配置不同,到底有何差距?
對技術不敏感的消費者來說,雷達和攝像頭的數量僅限于多和少的差別,鮮有人去深度了解其背后的邏輯和價值。如果把攝像頭比喻成人的眼睛,激光雷達、毫米波雷達和超聲波雷達,就相當于給眼睛增加了“透視功能”和“千里眼”。
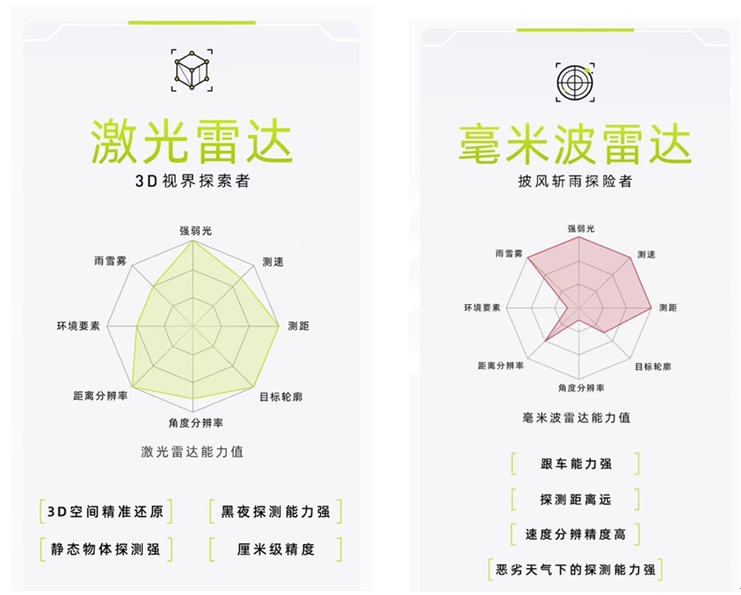
激光雷達雖然數量往往沒有超聲波雷達多,但它其實是構建車身完整3D空間的最強武器。激光雷達可以不受強弱光環境影響,在測距、測速和目標輪廓的分辨上能夠達到厘米級的精度——這樣的探索精度,不僅可以及時精準地識別路上的微小物體和行人,在通過狹窄車道或者夜間行駛時,也提供了巨大的安全保障。
毫米波雷達則在強弱光、雨雪霧天氣等視線受阻的環境下,擁有強大的測速和測距能力。對比其他雷達,它的跟車能力更強,探測距離更遠,速度分辨精度更高,即使在惡劣天氣中也能保持極高的探測能力。
對比之下,阿維塔11比Model Y增強了在激光雷達和毫米波雷達上的配置,毫無疑問,這會讓阿維塔11的環境感知優勢大大增強:
阿維塔11的三顆半固態激光雷達,遠距探測達150米,水平視角總覆蓋范圍約300度,垂直視角可達25度,水平視角總覆蓋范圍達到300度,垂直視角可達25度;還能同時監測前、左右、左后、右后方。覆蓋車身周圍大部分范圍的3D立體探測,為阿維塔11的環境感知提供了第一層有力的安全保障;6顆毫米波雷達,分別布置在車身四周,形成360度全覆蓋,最遠距離可達210米。在實際駕駛過程中,無論是變道時對后車速度的精確跟蹤,還是極端天氣下的距離識別,都能輕松駕馭。
兩車都有的配置:超聲波雷達和高清攝像頭又能做什么?
超聲波雷達的最大作用,就是可以利用超聲波回聲定位原理,探測汽車和障礙物,以及其他車輛之間的距離。高清攝像頭則作為直接模擬人眼的視覺載體,將工作重心放在環境要素的圖像感知上。攝像頭可以捕捉并采集目標的顏色、紋理進行環境分辨:比如檢測車道線,讓車輛始終處在居中行駛狀態,或是檢測紅綠燈和標志牌,幫助車輛的動態決策。

因此顯而易見,攝像頭的數量和分辨率不同,會顯著影響車輛的圖像感知能力。阿維塔11的13顆高清攝像頭可以遠距探測150米,覆蓋整車范圍360度,將車輛周圍環境無死角收錄,攝像頭數量上的優勢無疑又在圖像感知維度增強了它對Model Y的優勢。
純視覺vs視覺融合,究竟孰強孰弱?
用馬斯克本人的話來說,他認為“雷達和視覺感知始不一致。”誠然,特斯拉在自動駕駛算法和大數據層面或許有著一定的先手優勢。但在安全層面,面對我國更為復雜的路況,顯然有激光雷達作為加強的融合感知方案更加安全。阿維塔11的四層保證,不僅做到了全方位的立體覆蓋,而且預留了足夠的技術冗余,對汽車的安全駕駛來說,所有的技術冗余都會轉變為更大的安心。















 粵公網安備 44010602000157號
粵公網安備 44010602000157號
